Available Tools And Functions in Simulator
Available Tools And Functions in Simulator
The tools available inside simulator are :
- Display
- Switches
- Wheel Based Mobile Robot
- Areana/Maps

Program Structure
void setup()
{
// setup task goes here
}
void loop()
{
// loop task goes here
}
Builtin Functions Available
System
System functions and instructions for delaying and stopping the robot system
void sleep (int t); Delay time t milliseconds
void system_stop (); Stop the whole robot
LCD
lcd function and instruction set for creating numeric message display on the LCD screen
lcd ("Hello robot");
// Show Hello robot message via LCD screen
lcd ("Value =% d", i);
// Display the text Value = (variable value i) via the LCD screen
lcd ("Value1 =% d Value2 =% d", i, j);
Example
void setup()
{
//Data display format, text type and various variables
int a=2;
lcd("int value is %d ",a);
}
void loop()
{
}
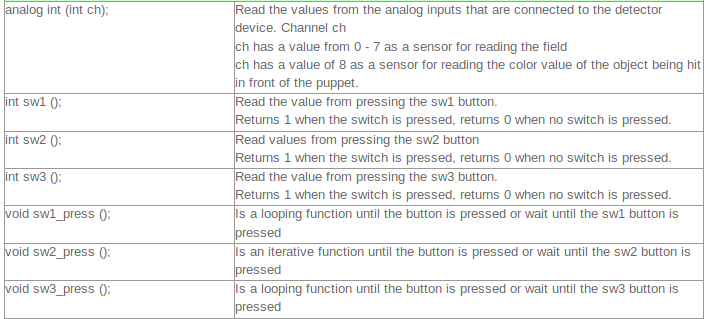
Input
Function and instruction set for reading values from analog inputs connected to the detector and switch buttons
//code to dispaly sensor value in lcd
int pa1=0;
void setup()
{
}
void loop()
{
pa1=analog(1);
lcd("value of sensor pa1=%d",pa1);
}
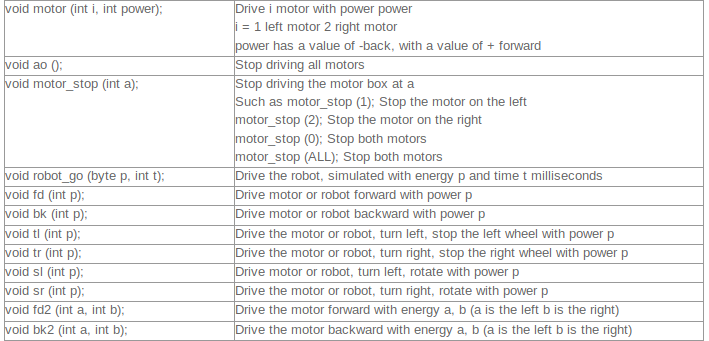
Motor
Function and instruction set for driving DC motor or controlling the robot's wheel